-
2025 - Present
Founder & Project Lead
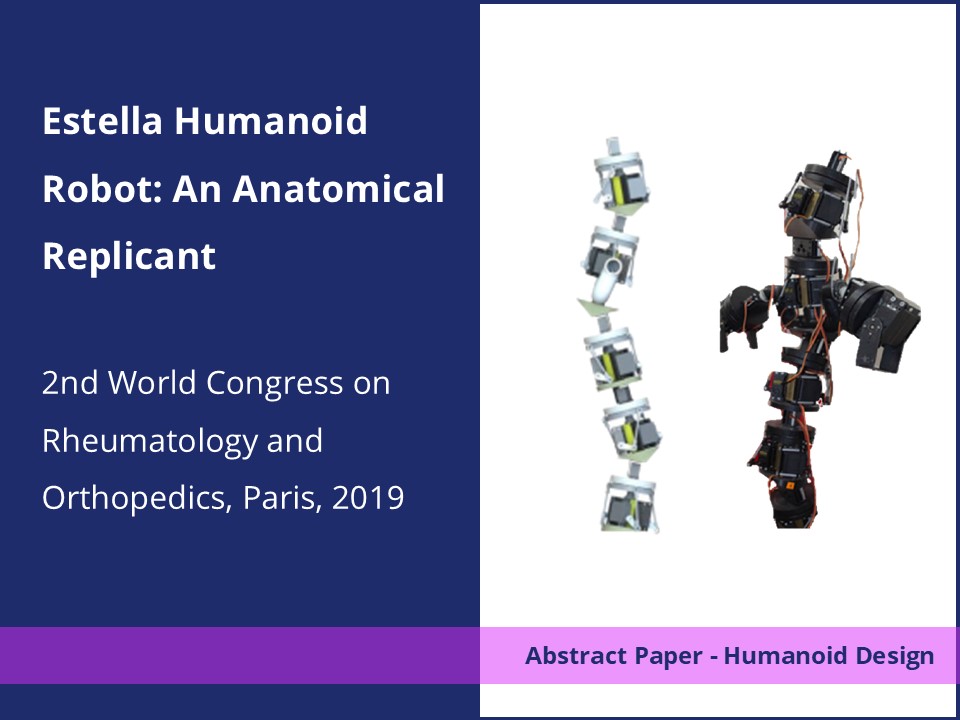
Estella Humanoids
Shiraz, Iran
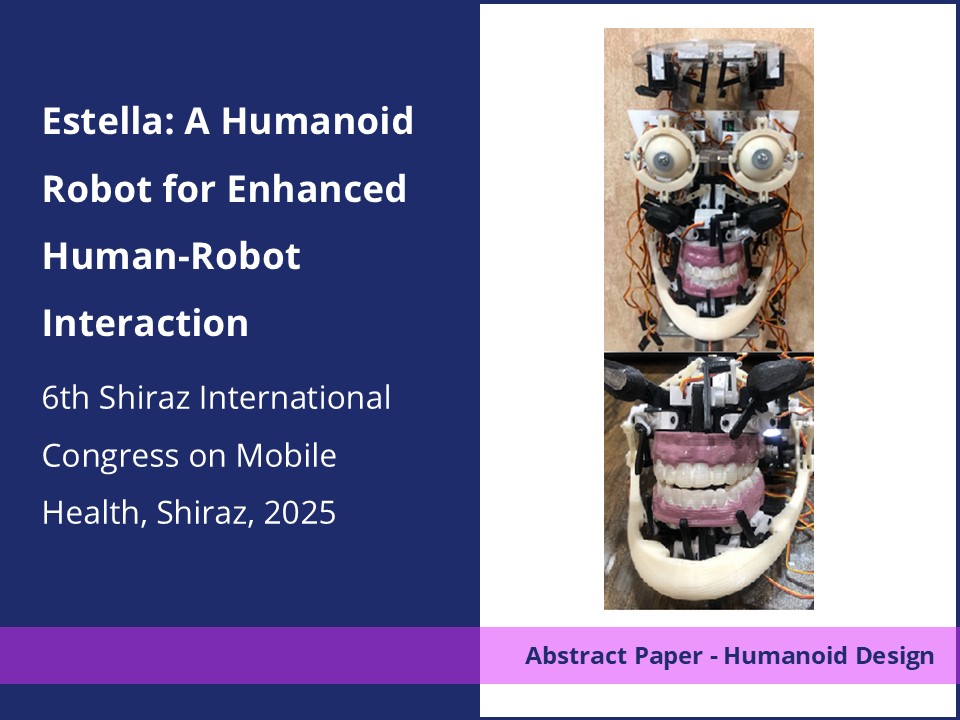
Currently lead the development of Estella, a humanoid robot designed to replicate human anatomy and simulate facial expressions with high fidelity, originally developed in Medis Startup Studio. Responsible for mechanical design, prototyping, and system architecture. Estella blends expressive movement and lifelike mechanics, inspired by real human motion and emotion. Focused on creating open-source and research-driven solutions for human-robot interaction.
-
2023 - Present
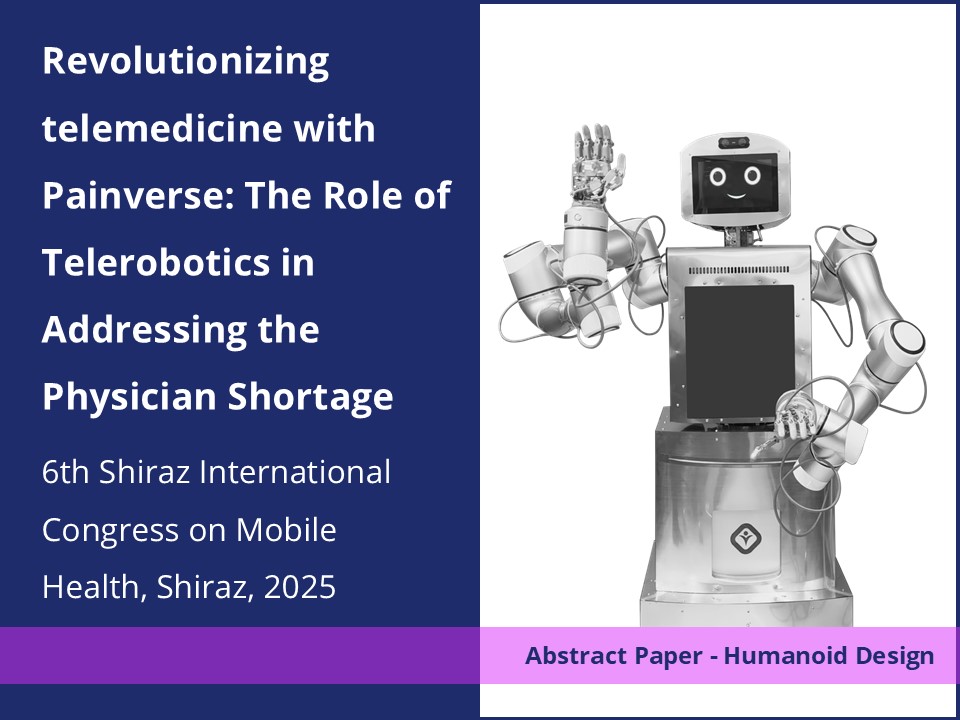
Painverse Telerobotics Inc.
Shiraz, Iran
Contributed to the development of a telerobotic system enabling remote physical examination using humanoid robots and an XR interface. Led the project management, mechanical design, kinematic analysis of the Vira robot and implemented real-time motion logic for safe and natural human-like interaction. The project aimed to address physician shortages in remote areas by integrating robotics with telehealth.
2023 - Present
Project Lead
-
2019 - 2024
Senior Robotics Engineer
& Project Manager
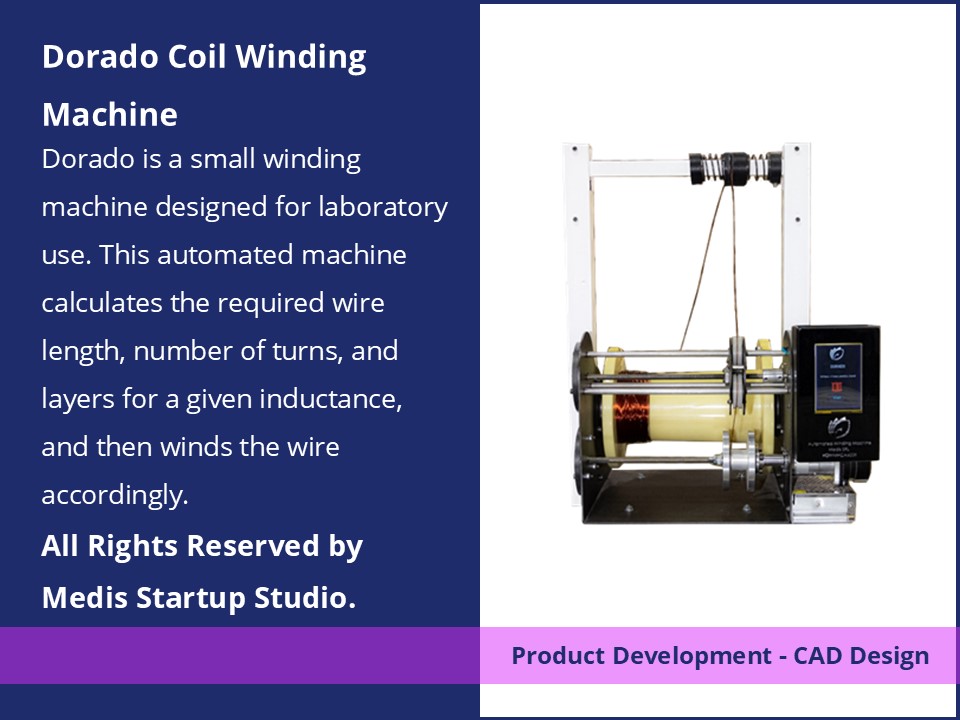
Medis Studio
Shiraz, Iran
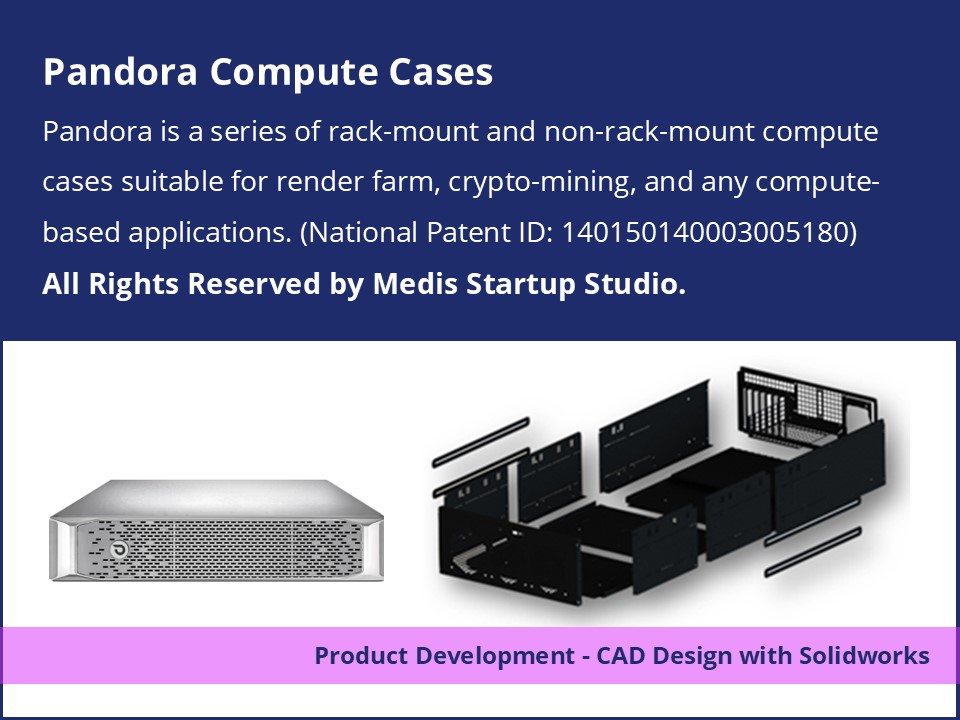
Project Management, Developing Mechanical Design by Considering the Feasibility of Production, Designing and Analyzing of Mechanical Systems, Trajectory and Path Planning Algorithms by Considering Obstacle Avoidance, Design, Prototyping and Manufacturing Products
-
2017 - 2024
Research & Development Team Member
Medis Studio
Shiraz, Iran
Market Analysis and Financial Analysis, Designing Business Models, Designing company administration systems
2019 - 2024
Research & Development Team Member
-
2017 - 2019
Junior Robotics Design Engineer
Medis Studio
Shiraz, Iran
Designing Mechanical Parts Especially for Robotics Purposes, Involve with the Manufacturing Process, Prototyping Robotics Parts Especially 3D Printing
-
2015 - 2017
Robotics Intern
Medis Studio
Shiraz, Iran
I started my part-time internship parallel with university to learn mechanical design and prototyping and on the other hand, learning electronics, programming and robotics.
2015 - 2017
Robotics Intern
about me
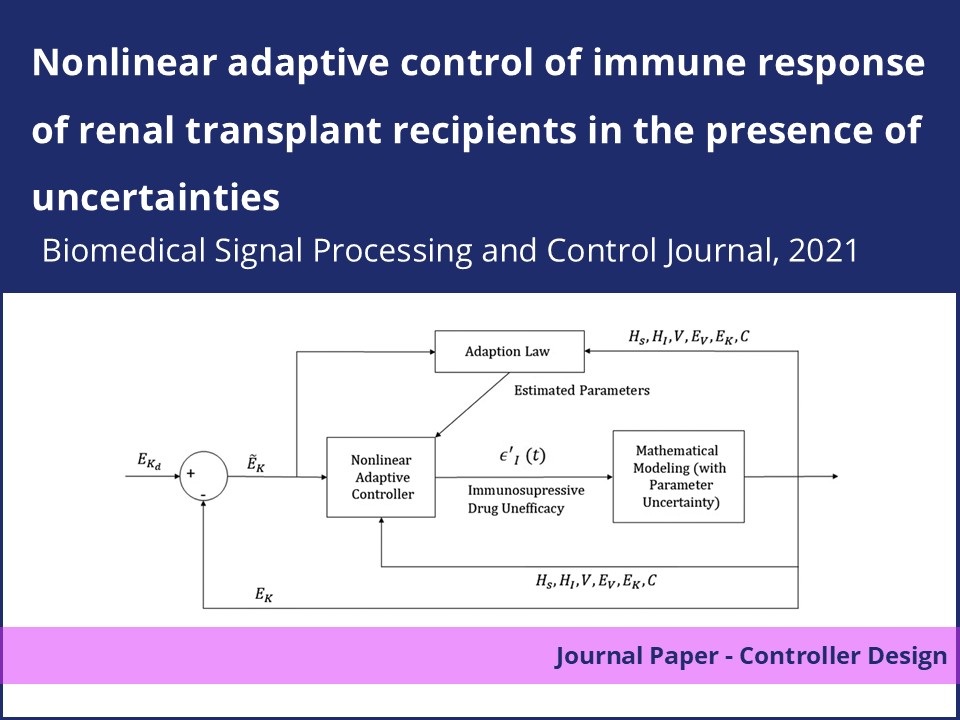
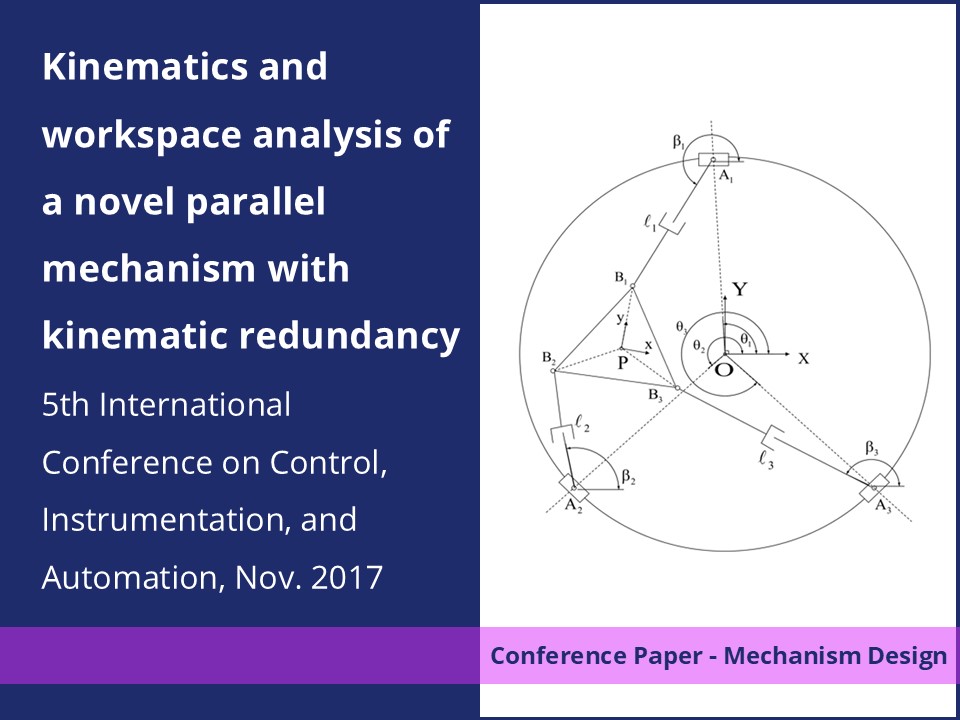
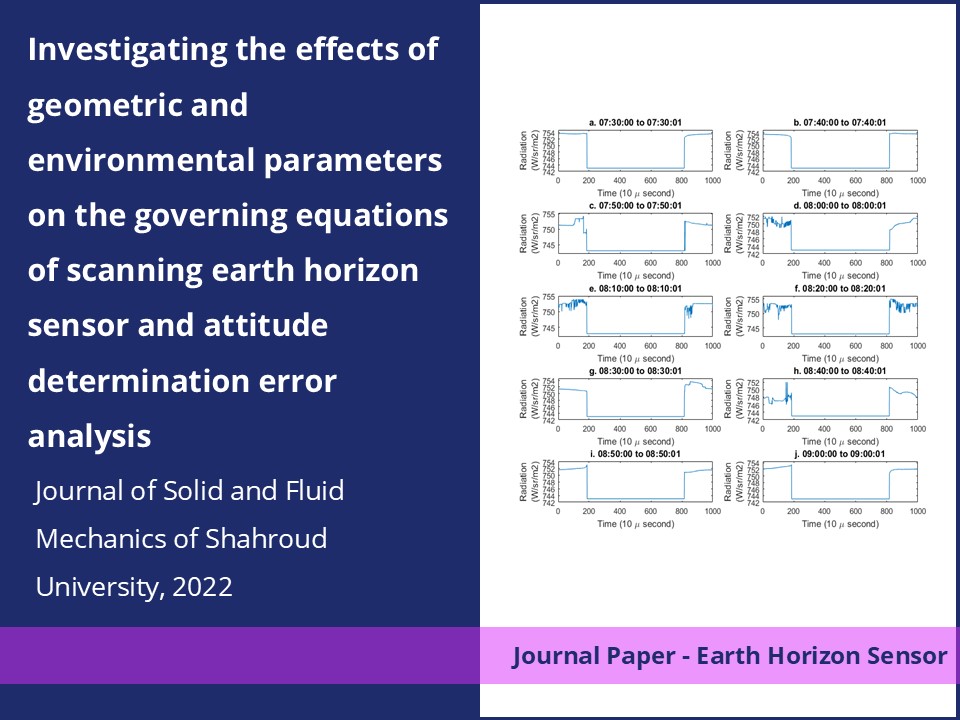
I'm a multidisciplinary engineer and researcher with a background in mechanical engineering, robotics, and system dynamics. My work spans a wide range of fields including robotic system design, satellite sensor modeling, biological control systems, and data-driven research in public health.
I earned both my M.Sc. and B.Sc. from Shiraz University in Iran, where I developed a strong foundation in mechanical system design, control theory, and dynamic modeling. Also, I held multiple roles at Medis Startup Studio, overseeing the design, prototyping, and development of more than 10 products. Whether I’m designing a robotic mechanism, modeling immune responses, or analyzing large-scale health data, I approach each challenge with curiosity, precision, and a drive to make meaningful impact.
Website
neginheiran.com